
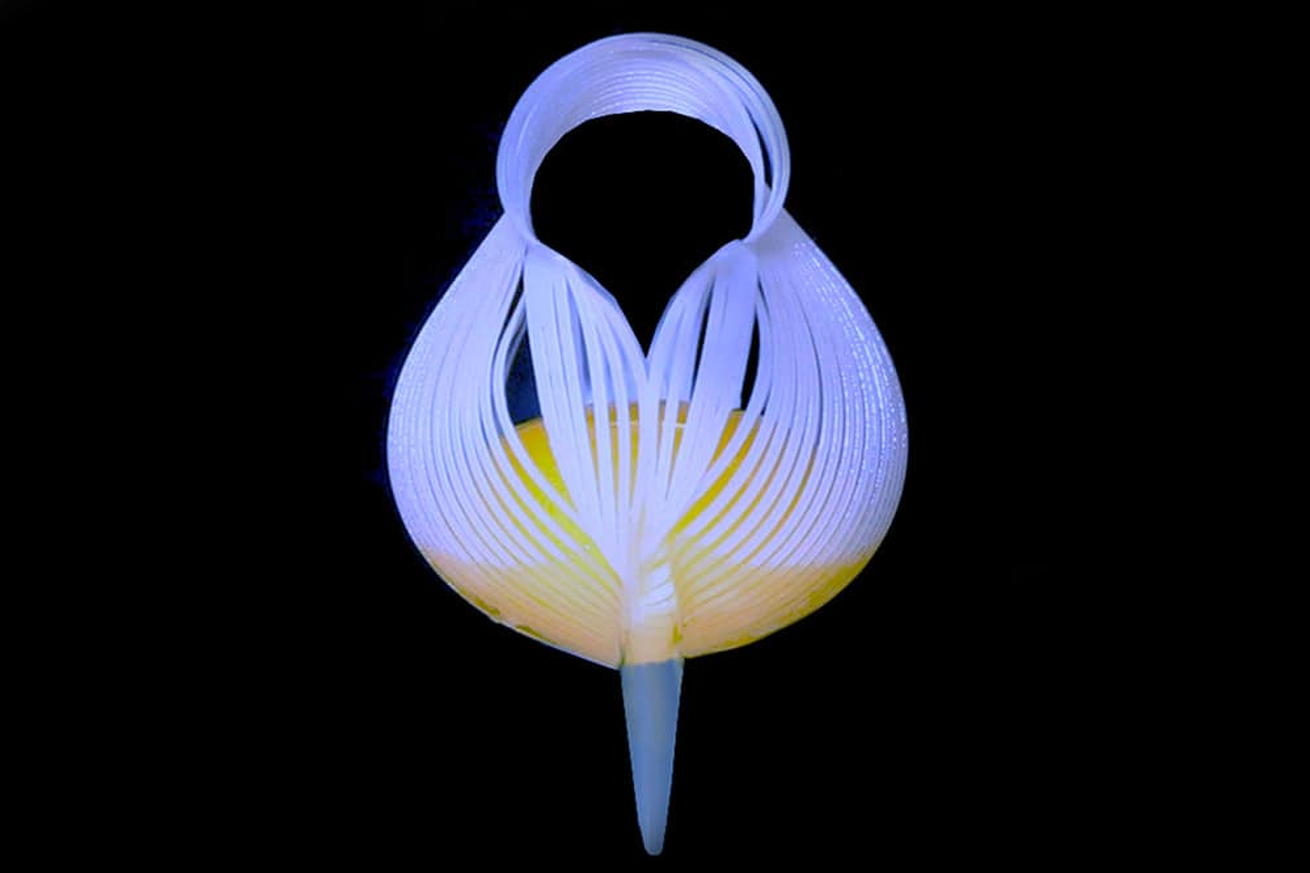
The gripper is made from a specially cut kirigami sheet that folds up into a 3D enclosure. | Image: Hong et al, Nature Comm (2000)
Designing robots that can handle fragile items is a big challenge for engineers. For warehouses, robots have been developed that use soft rubber fingers to grab items like fruit, but what about targets that are even more delicate? Like, say, a raw egg yolk?
Well, researchers from North Carolina State University have demonstrated a new type of gripper that could one day help machines pick up even the most breakable items — including yolks. Inspired by the Japanese art of kirigami (like origami, but you fold and cut the paper), their gripper is made from flat sheets of material cut with parallel slits. When the ends of the sheet are pulled apart, the gripper forms itself into a 3D sphere that can be used to gently and precisely grab…
{kind=link}